Bhargav Soothram
bhargav[dot]soothram[at]gmail[dot]com
bhargav[dot]soothram[at]gmail[dot]com
⇒ Reconstructed a 3D scene, while simultaneously obtaining the camera poses of a monocular camera w.r.t. the given scene. A Triangulation - PnP - Bundle Adjustment pipeline was used to accomplish the task.
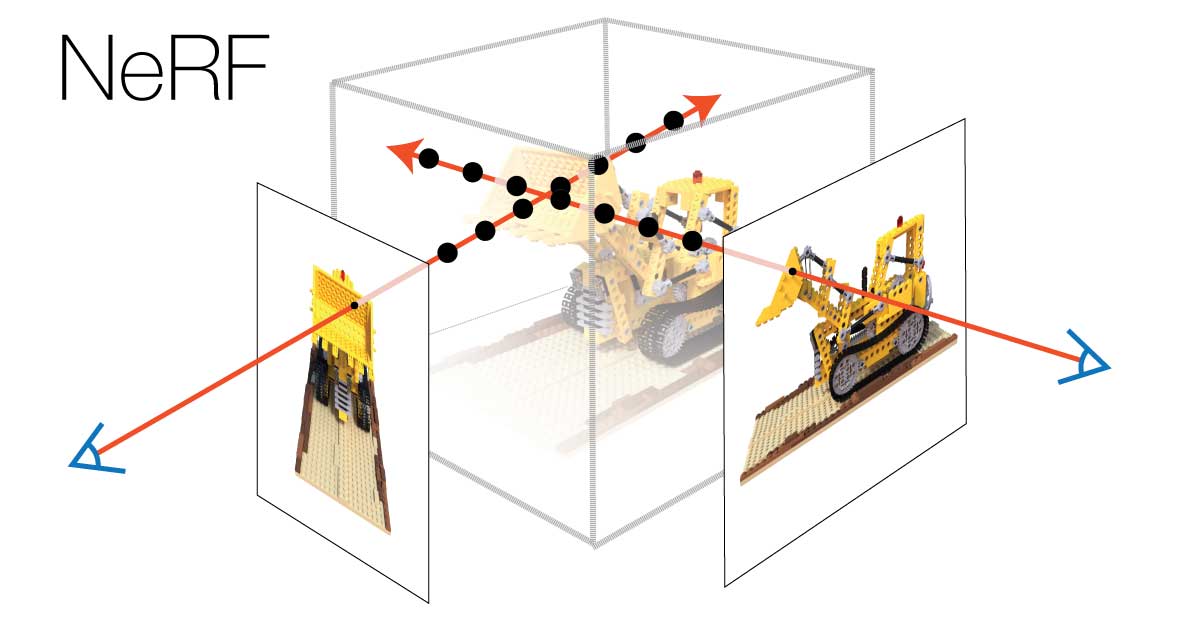
⇒ Implementation of the original NeRF paper: synthesized novel views of complex scenes by optimizing an underlying continuous volumetric scene function using a sparse set of input views.
Tech stack: Python, OpenCV, Pytorch | Github link
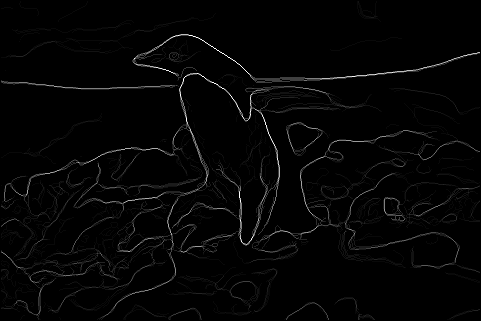
⇒ Developed a simplified version of pb (probability of boundary) method, which finds boundaries by examining brightness, color, and texture information across multiple scales.
⇒ Investigated ResNet, ResNeXt, and DenseNet architectures on image classification. Compared the architectures on various criteria, including train and test set accuracies, and computational complexity.
Tech stack: Python, OpenCV, Pytorch | Github link

⇒Created panoramas by stitching images together by first creating feature descriptors and then matching the features.
⇒ Solved the problem of accumulated homography errors when stitching a lot of images by using cylindrical projections along with ordered stitching
Tech stack: Python, OpenCV, Pytorch | Github link

⇒ Detected lanes and estimated turn using probabilistic hough transforms and sliding window approach.
⇒ Applied histogram equalization to balance out images with high contrast, and used historical data to predict lanes in scenes with extreme contrast.
Tech stack: Python, OpenCV | Github link
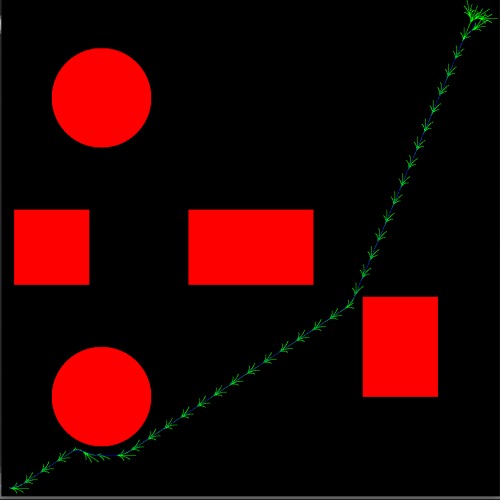
⇒ Implemented A* algorithm for moving a non-holonomic robot from one location to another, and simulated the planner using ROS and Gazebo.
⇒ Demonstrated the planner using Turtlebot3, optimizing the code to win ENPM661's Turtlebot competition at UMD.Tech stack: Python, OpenCV, ROS | Github link